
Guillaume Dumas
MEng, MSc, PhD, HDR
A roadmap to computational social neuroscience
Abstract:
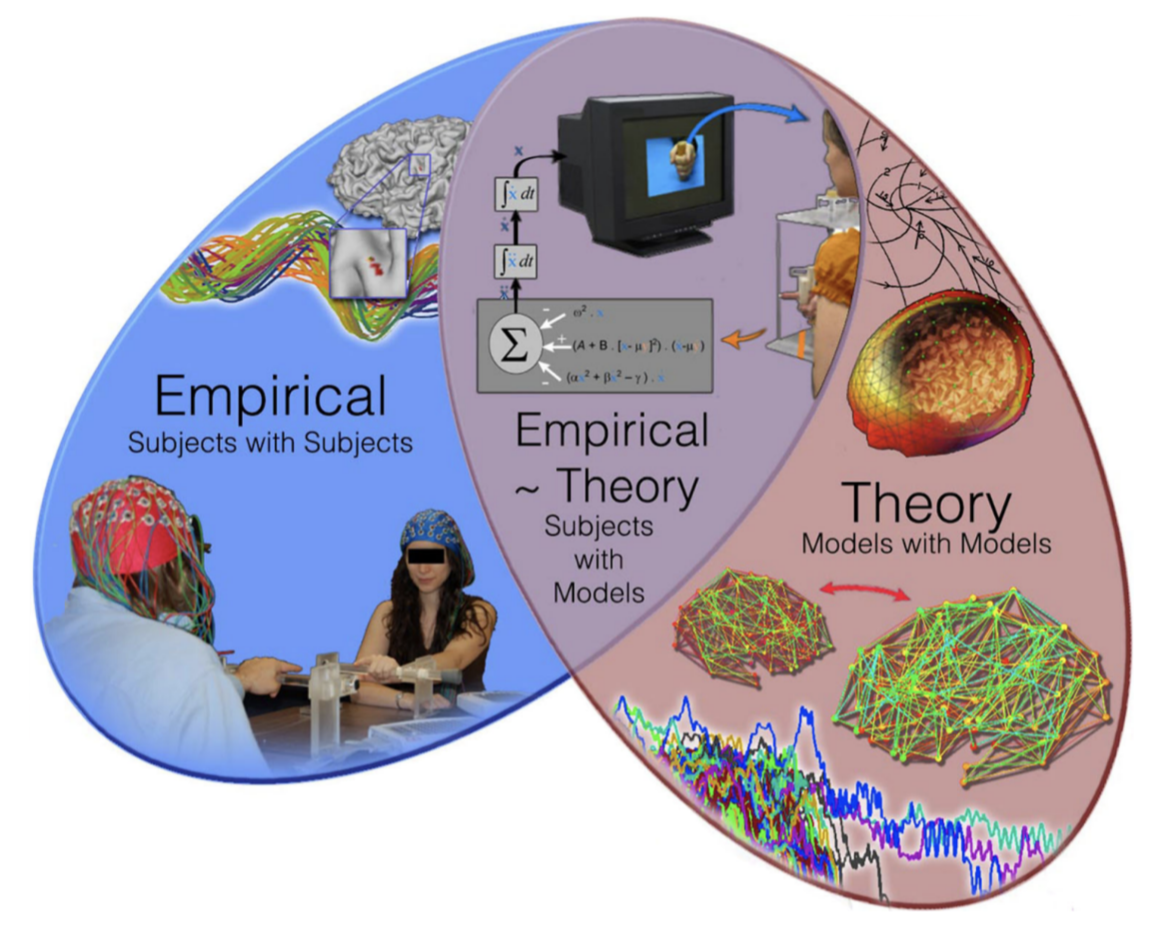
To complement experimental efforts toward understanding human social interactions at both neural and behavioral levels, two computational approaches are presented: (1) a fully parameterizable mathematical model of a social partner, the Human Dynamic Clamp which, by virtue of experimentally controlled interactions between Virtual Partners and real people, allows for emergent behaviors to be studied; and (2) a multiscale neurocomputational model of social coordination that enables exploration of social self-organization at all levels—from neuronal patterns to people interacting with each other. These complementary frameworks and the cross product of their analysis aim at understanding the fundamental principles governing social behavior.